1. Overview
The command independent execution function runs in a way that the user defines an input signal and a command relevant to it, and, when the state of the input signal changes from the off state to the on state, the command will be executed independently of the operation program of the robot.
This Hi5 Command independent execution Function Manual will be explained based on the following system. Considering that individual systems that are provided at actual sites may not be identical to this system, the operators at individual sites should use their own system by referring to this manual.
System specification in this manual
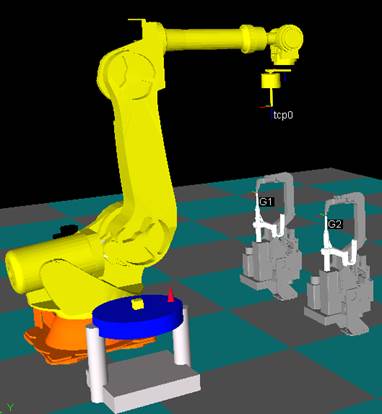
Robot(HS165-02), stationary servo gun (G1), stationary servo gun (G2), 1–axis positioner (P1)
G1 and G2 will carry out the tip dressing and gun search operations regardless of the operation of the robot. P1 is designed for building a system that makes it possible to move to a designated position.
Necessary manuals
n Hi5 Controller Operation Manual
n Hi5 Additional Axis Function Manual
n Hi5 Multitasking Manual