2. Collision detection setting– Menu components
The menu as below is provided from 『[F2]: System』 → 『3: Robot Parameter』 → 『8: Collision Detection』
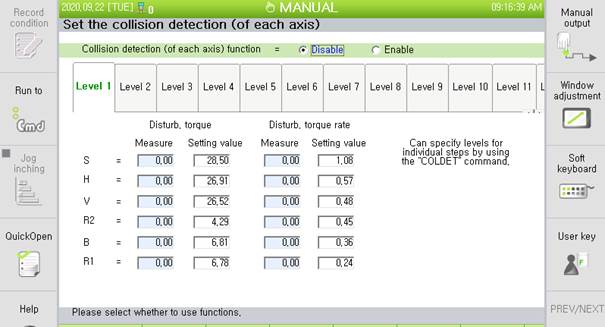
2.1. Collision Detection Function
2.4. Measured value and set value
2.5. Summary of the method of applying the collision detection function for a specific working range